Dari sampul majalah Science Robotics edisi terbaru, muncul robot berkaki empat yang dibuat tanpa komponen elektornik. Konon inspirasi penelitian dan pengembangan robot ini berasal dari kura-kura. Sehingga dapat menggerakkan empat kakinya secara bergantian.
Secara tampilan, Pengembangan Robot ini sepertinya disambung dengan tabung plastik dengan ketebalan berbeda. Sekilas, Kelihatannya agak kurang canggih. Hebatnya, robot hasil dari tumpukan plastik ini bisa menjadi sampul edisi teratas di bidang robotika.
Tidak seperti kebanyakan robot perangkat lunak, Pengembangan robot ini tidak dikendalikan oleh komponen elektromekanis dan dapat digerakkan oleh osilator cincin yang terdiri dari katup lunak.
Pada 17 Februari 2021, hasil penelitian terkait dipublikasikan secara resmi di Science Robotics dengan judul Electronic-free pneumatic circuit untuk mengendalikan robot berkaki lunak. Penulis jurnal berasal dari Departemen Teknik Mesin dan Material Science and Engineering, University of California, San Diego.
Pengembangan Robot Tanpa Komponen Elektronik
Robot lunak yang digerakkan secara pneumatik memiliki kemampuan beradaptasi lingkungan yang baik. Pada ICRA 2017, International Conference on Robotics and Automation. Laboratorium Robotika di University of California San Diego mengumumkan robot berkaki empat lunak yang dicetak 3D. Tim peneliti mengklaim bahwa robot ini dapat menaklukkan semua medan.
Sebelumnya dilaporkan bahwa Pengembangan robot ini digerakkan oleh gas. Setiap kakinya terbuat dari 3 karet tabung angin yang dapat ditarik. Keempat kakinya dihubungkan dalam bentuk X dan dapat berjalan melalui desain inflasi atau kebocoran.
Seperti yang ditunjukkan pada gambar di bawah, banyak robot dikendalikan oleh komponen elektromekanis. Seperti katup dan pompa, yang biasanya berukuran besar dan mahal.
Berdasarkan hal tersebut, tim peneliti menggunakan soft valve untuk merancang cincin osilator.
Prinsip Kerja Dari Pengembangan Robot
Osilator dapat digunakan untuk menghasilkan sinyal elektronik yang berulang. Perangkat konversi energi yang dapat mengubah daya DC menjadi daya AC dengan frekuensi tertentu.
Melalui osilator cincin seperti itu, sinyal osilasi dapat dihasilkan. Kemudian sinyal osilasi dihasilkan oleh elemen logika pneumatik sebagai respons terhadap input sensor dan gaya yang dihasilkan. Proses menghasilkan sinyal berosilasi mirip dengan penggunaan generator pola sentral (CPG) oleh organisme alami. Pengembangan Robot ini mirip hewan berkaki empat untuk mencapai gerakan berulang dari anggota tubuh seperti berjalan, terbang dan berenang.
Biasanya, proses ini dimediasi oleh umpan balik sensorik. Tetapi struktur CPG pada dasarnya hanyalah rangkaian berulang yang menggerakkan otot untuk menghasilkan gaya berjalan yang stabil dan terus menerus secara berurutan.
Dalam hal ini, otot pneumatik didorong menjadi pasangan yang berlawanan. Membentuk gaya berjalan ganda garis diagonal. Dan dua kaki diagonal berputar ke depan dan ke belakang pada saat yang bersamaan.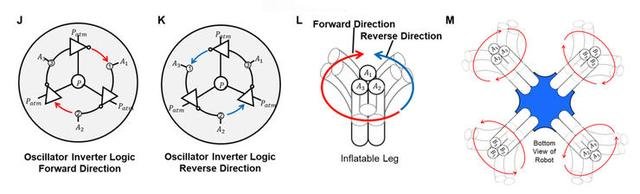
Menurut makalah Pengembangan Robot tersebut, setiap kaki robot ini memiliki 3 derajat ruang gerak. Membutuhkan sumber udara tekan yang konstan untuk mendukung sistem kendali dan sistem penggerak.
Secara khusus, para peneliti berhasil memandu sumber tekanan yang bisa berupa tali atau kartrid karbon dioksida built-in. Ke empat kaki melalui sirkuit katup tiga arah berosilasi yang seluruhnya terbuat dari bahan lunak. Dan ada tiga ruang udara yang berbeda di setiap kaki.
Jadi, Apa Prinsip Dari Rangkaian Katup Tiga Arah Berosilasi?
Dipahami bahwa rangkaian itu sendiri terdiri dari tiga katup pneumatik bistable. Katup tersebut dihubungkan dengan pipa dan memberikan ketahanan terhadap aliran gas melalui pipa yang dapat disesuaikan dengan mengubah panjang dan diameter bagian dalam pipa.
Dalam sebuah percobaan, para peneliti menemukan:
Menggunakan 3 elemen memori pneumatik katup untuk mengontrol gaya berjalan dasar.
Melalui 2 rangkaian osilator 7 katup kecepatan gerakan dapat ditingkatkan 270%.
Para peneliti pengembangan robot merancang elemen memori pneumatik untuk mensimulasikan sakelar double-pole double-throw. Sakelar DPDT yang merupakan sakelar dengan 2 input dan 4 output yang masing-masing memiliki 2 output yang sesuai.
Selain itu, mereka mendemonstrasikan pengembangan sirkuit kontrol yang memungkinkan robot melakukan gerakan omni-directional antara gaya berjalan dan merespons input sensor.
Perlu disebutkan bahwa meskipun probe Venus yang dikembangkan oleh Jet Propulsion Laboratory NASA bukanlah robot perangkat lunak. Ia tidak dapat mengandalkan sistem elektronik tradisional untuk navigasi atau kontrol otonom. IEEE Spectrum melaporkan:
Fakta telah membuktikan bahwa ada banyak cara cerdas untuk membuat robot menyelesaikan perilaku otonom yang relatif kompleks.
Baca juga : Penerapan Kecerdasan Buatan Dan Machine Learning Di Bidang Industri Keuangan
Bagaimana Cara Mengembangkan Robot Perangkat Lunak?
Secara umum, robot lunak tidak terbuat dari bahan lunak seperti yang kita bayangkan. Karena pengembangan pasokan energi fleksibel dan komponen kontrol seperti baterai fleksibel dan papan sirkuit selalu menjadi kesulitan utama.
Hal paling keren tentang robot yang disebutkan di atas adalah mereka telah mencapai kontrol gaya berjalan dengan cara yang berbeda.
Baca juga : 7 Kecerdasan Buatan Yang Perlu Diwaspadai Manusia
Tim peneliti menyatakan:
Penelitian ini merupakan langkah menuju penerapan robot otonom penuh tanpa komponen elektronik. Baik itu pengembangan robot hiburan berbiaya rendah maupun penerapan robot di lingkungan yang ekstrim. Penelitian ini berperan dalam mempromosikan.
Faktanya, terobosan ini bukanlah yang pertama direalisasikan. Tahun 2016, Wyss Institute for Biologically Inspired Engineering di Harvard University juga merancang soft robot, yang dikenal sebagai Robot dengan perangkat lunak dan self-driven pertama di dunia.
Menurut makalah terkait, semua perangkat lunak dari robot mirip gurita kecil ini dapat berjalan secara mandiri selama 4-8 menit tanpa kontrol atau stimulasi eksternal. Fitur utamanya adalah dapat mengemudi sendiri tanpa baterai dan papan sirkuit.
Meski begitu, perkembangan robot perangkat lunak masih relatif lambat, seperti pendapat IEEE Spectrum:
Robot lunak pada dasarnya harus aman, fleksibel dan sangat murah. Sehingga diharapkan dapat digunakan secara luas. Namun, dibandingkan dengan robot di bidang lain, perkembangan robot perangkat lunak lebih lambat. Salah satu alasannya adalah bahwa robot perangkat lunak tidak dapat secara langsung mendapatkan keuntungan dari perkembangan signifikan daya komputasi, sensor dan actuator.
Tidak diragukan lagi, pengembangan robot perangkat lunak tidak terlepas dari kemajuan berbagai disiplin ilmu termasuk ilmu material, robotika, biomekanik, penginderaan dan pengendalian. Dengan pesatnya perkembangan disiplin ilmu terkait dalam beberapa tahun terakhir, robot perangkat lunak dengan metode mengemudi yang berbeda mulai bermunculan. Kita akan dapat terus memperhatikan setiap terobosan dalam robot perangkat lunak di masa mendatang.





